 For more information visit:
For more information visit:
– http://www.kyb.tuebingen.mpg.de/research/dep/bu/hri.html
– http://antoniofranchi.com/robotics/
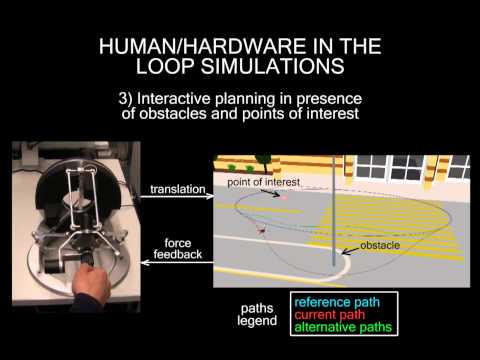
This paper presents a framework that extends of bilateral shared control of mobile robots with the aim of increasing the robot autonomy and decreasing the operator commitment.
Persistent autonomous behaviors are considered where a cyclic motion must be executed by the robot. The human operator is in charge of modifying online some geometric properties of the desired path. This is then autonomously processed by the robot in order to produce an actual path guaranteeing: i) tracking feasibility, ii) collision avoidance with obstacles, iii) closeness to the desired path set by the human operator, and iv) proximity to some points of interest.
A force feedback is implemented to inform the human operator of the global deformation of the pathrather than using the classical mismatch between desired and executed motion commands.
Duration : 0:2:59
[youtube ZY8pFydb0oY]
Leave a Reply
You must be logged in to post a comment.